redpesk@ CAN binding architecture
Meant to:
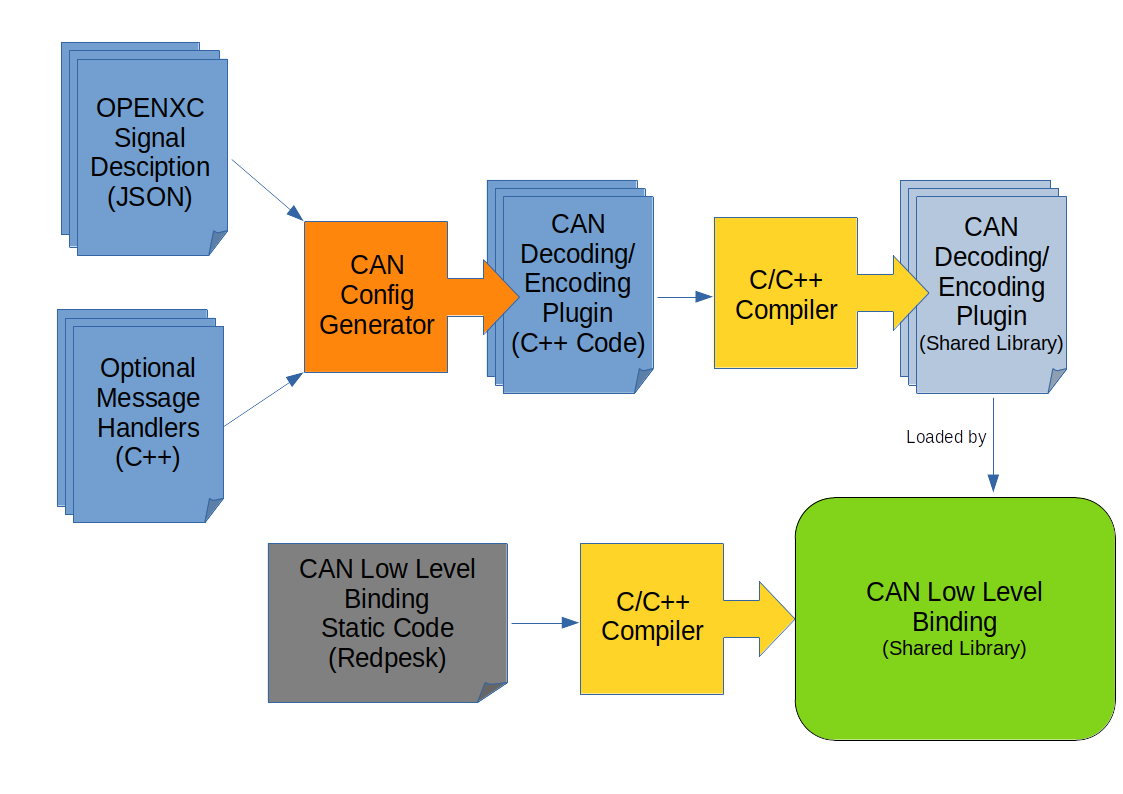
- Generate CAN decoding/encoding shared libraries.
- Load them.
- Decode/Encode any CAN message.
Bringing CAN management into the redpesk@ project is more than allowing decoding and printing CAN messages, lots of tools can do that (Wireshark, CAN-utils, …).
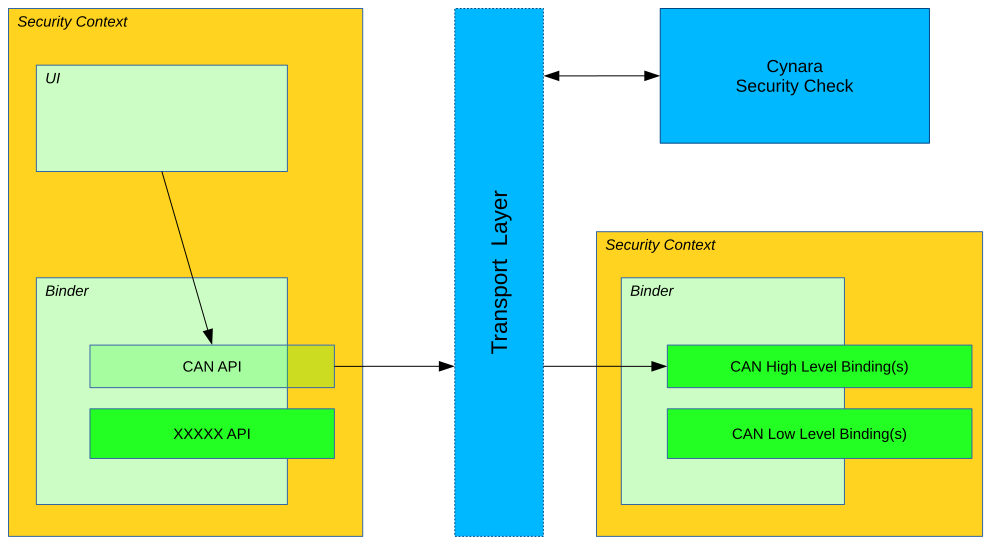
The goal is to provide a common API and abstraction to the CAN bus so you can bring some more high level functionalities to the system.
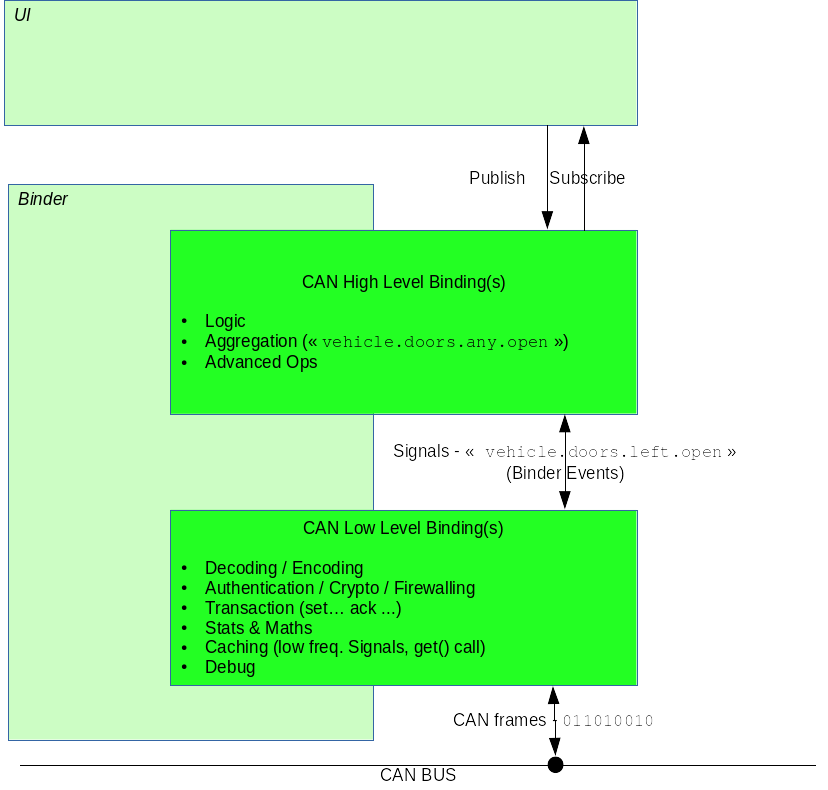
CAN binding will be separated into two parts:
-
High level: Binding from which other applications will connect to. It will provide valuable access to the CAN bus by aggregating signals or providing new signals from several sources. For example, a signal exposing whether or not a door is open, no matter which one it is. Also, we can imagine an application which supervises if there is no one in the car but moving (1m, 2m ?) to alert the owner of unexpected behavior. The high level binding will send a single event representing that behavior to the application which in turn will send a phone message.
-
Low level: Decode messages that transit and send events through Application Framework to the subscribers with human readable messages. It provides some basic access to the bus + some basic mathematical, statistical features (last_values, min, max, timestamps, averaging) as well as basic filters to get discerning signals only.
Last but not least, the low level binding can be shipped as binary only using OpenXC inspired redpesk@ canbus Generator.