Build a Zephyr app in redpesk - User Workflow
Prerequisites
Prepare your Zephyr app
If you want to build a Zephyr custom user app, its structure must meet Zephyr’s requirements.
On the other hand, if you want to build a Zephyr sample available in Zephyr file tree, you can skip this step.
The structure of a Zephyr app is described in the official Zephyr documentation:
- Zephyr Latest: https://docs.zephyrproject.org/4.2.1/develop/application/index.html
- Zephyr LTS3: https://docs.zephyrproject.org/3.7.1/application/index.html
Also, your Zephyr custom user app must be designed for one of the Zephyr distro we provide in redpesk.
If you want your app to be built on several of the distro products we provide, please prepare a distinct branch for each Zephyr distro.
As an example, we provide our own Zephyr custom user app “Zephyr-shell” available here: https://github.com/iotbzh/zephyr-shell
Zephyr app building guide
Create your project
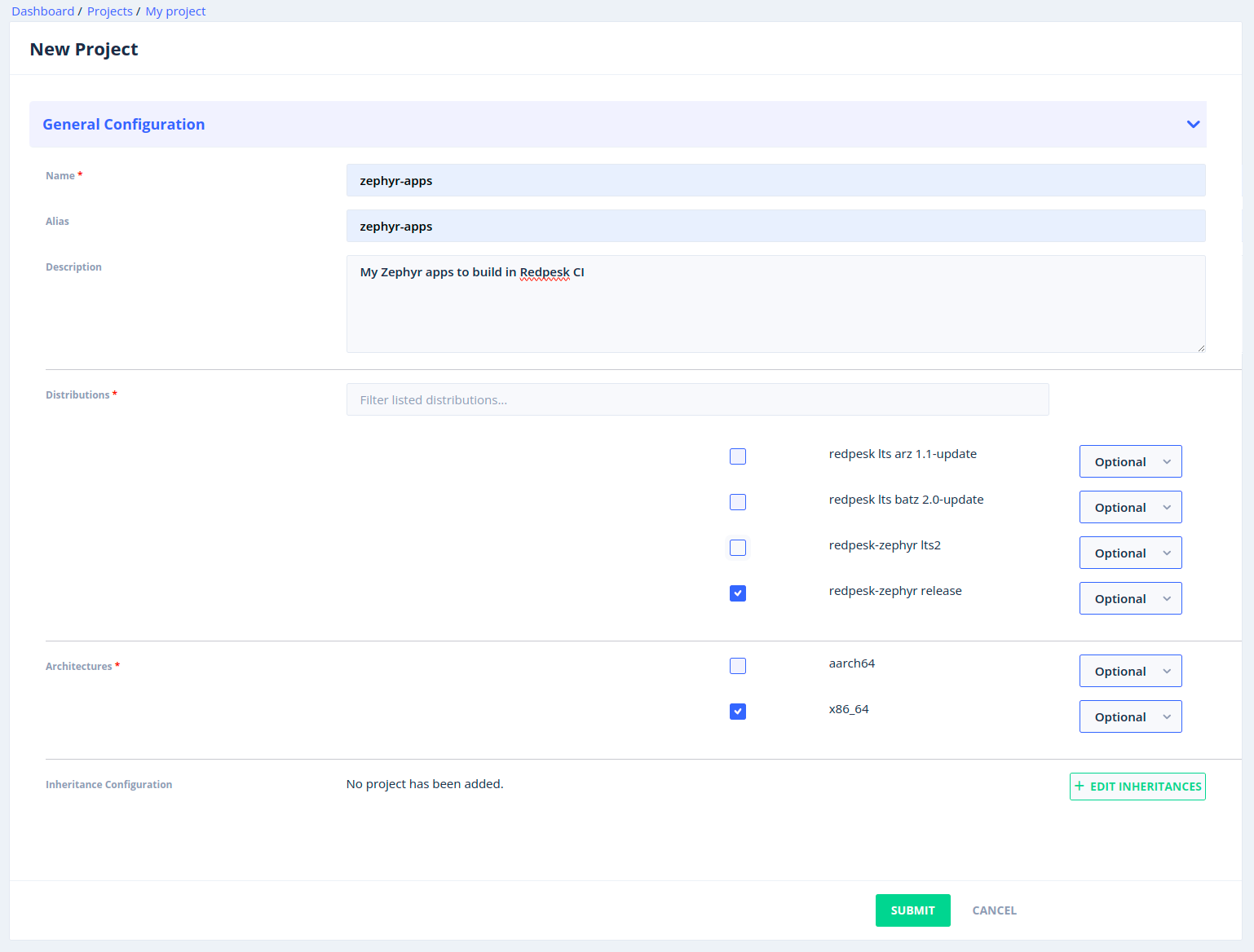
To build Zephyr apps, you will first need to create a standard project.
This project can also contain other unrelated Apps.
- Name: Any name you want, the name we are using in this guide is “zephyr-apps”
-
Distributions: Select one Zephyr distribution only
Note: Multi distribution builds should be available later
- Architectures: x86_64 (even if your target is ARM)
- Inheritance: You do not need any specific inheritance to build Zephyr apps
Create your Zephyr app
You will now create your Zephyr app in the project you just created.
In the following guide, two types of Zephyr app are supported, please follow the suited guide for your case:
- Zephyr sample app: An app that is present in the Zephyr kernel file tree (samples and tests)
- Zephyr custom user app: Your very own app hosted on a public git repository and prepared as described here
We are providing some examples of specfiles for users to use as starting points:
- Specfile samples: https://github.com/redpesk-samples/specfile-samples
- Specfile templates: https://github.com/redpesk-samples/specfile-templates
Board support management
Board support packages are an all in one package pulling every ressources needed to build firmware for a specific Zephyr target/board.
When including the boars support package for your target in your environment, you will not need to include any other package.
These packages handle including needed hal and toolchain.
Here are the available board support packages:
| Zephyr target name | Board support package name |
|---|---|
| qemu_x86_64 | zephyr-kernel-board-qemu_x86_64 |
| imx8mp_evk/mimx8ml8/m7 | zephyr-kernel-board-imx8mp_evk_mimx8ml8_m7 |
As an example, all our specfile samples and templates are all supporting all these board support packages.
specfile: conditional BuildRequires (universal)
%define targetname qemu_x86_64
...
# Required Zephyr packages
%if "%{targetname}" == "qemu_x86_64"
BuildRequires: zephyr-kernel-board-qemu_x86_64
%elif "%{targetname}" == "imx8mp_evk/mimx8ml8/m7"
BuildRequires: zephyr-kernel-board-imx8mp_evk_mimx8ml8_m7
%else
BuildRequires: zephyr-kernel
BuildRequires: zephyr-kernel-hal
%if "%{?targettoolchain}" != "" && "%{?targettoolchain}" != "_TO_COMPLETE_"
BuildRequires: zephyr-toolchain-%{targettoolchain}
%else
BuildRequires: zephyr-toolchain-all
%endif
%endif
...
Zephyr toolchain management
Depending on SDK version, the list of supported architecture is different, please check available toolchain packages in your redpesk Factory under projects->distributions.
Depending on your target (targetname in specfile samples and templates), you will need the corresponding toolchain providing Zephyr the tools it needs to build a firmware for your target architecture in the build environment.
To pull the needed toolchain, you can fill the targettoolchain variable with the name of the toolchain you need from the toolchain list above.
If you are not using one of our specfile samples or templates, you can add the toolchain you need to your build environment by adding BuildRequires: zephyr-toolchain-{toolchain_arch} to your application specfile.
As an example, if you need the aarch64 toolchain, please include it to your build environment by adding BuildRequires: zephyr-toolchain-aarch64 to your application specfile.
If you don’t know which toolchain you need, please include all available toolchains to your build environment by adding BuildRequires: zephyr-toolchain-all to your application specfile.
For example, our specfile samples are using qemu_x86_64 (targetname) as a standard target and the corresponding x86_64 (targettoolchain) toolchain.
specfile templates or samples: include specific Zephyr toolchain
...
%define targetname qemu_x86_64
%define targettoolchain x86_64
...
BuildRequires: zephyr-toolchain-%{targettoolchain}
...
user specfile: include all Zephyr toolchain
...
# Required Zephyr packages
BuildRequires: zephyr-kernel
BuildRequires: zephyr-toolchain-all
...
Zephyr HAL management
If you want to build your Zephyr application for a physical board, there is a very good chance that you need to include a zephyr-kernel-hal-X package to your build environment.
Typically, you won’t need HALs if you build a firmware for a qemu_x86_64 target, but you will need it to build a firmware for an ST, NXP or any other vendor board.
Depending on your target (targetname in specfile samples and templates), you may need a specific HAL provided by your target vendor in the build environment.
Available HALs for the Zephyr version you are using can be seen in your redpesk factory under projects->distributions.
If you don’t know which HAL you need, please include all available HALs to your build environment by adding BuildRequires: zephyr-kernel-hal to your application specfile.
Here is how you can include needed HAL package:
specfile: conditional BuildRequires (universal)
%define targetname qemu_x86_64
...
# Required Zephyr packages
%if "%{targetname}" == "qemu_x86_64"
BuildRequires: zephyr-kernel-board-qemu_x86_64
%elif "%{targetname}" == "imx8mp_evk/mimx8ml8/m7"
BuildRequires: zephyr-kernel-board-imx8mp_evk_mimx8ml8_m7
%else
BuildRequires: zephyr-kernel
BuildRequires: zephyr-kernel-hal
%if "%{?targettoolchain}" != "" && "%{?targettoolchain}" != "_TO_COMPLETE_"
BuildRequires: zephyr-toolchain-%{targettoolchain}
%else
BuildRequires: zephyr-toolchain-all
%endif
%endif
...
specfile: only one HAL - IMX8MP M7
%define targetname imx8mp_evk/mimx8ml8/m7
%define targettoolchain arm
...
# Required Zephyr packages
BuildRequires: zephyr-kernel
BuildRequires: zephyr-kernel-hal-nxp
BuildRequires: zephyr-kernel-hal-cmsis
BuildRequires: zephyr-kernel-hal-cmsis_6
BuildRequires: zephyr-toolchain-%{targettoolchain}
%endif
...
Real-life examples can be found in our specfile samples and templates.
Zephyr sample app
As a Zephyr sample app example, we will prepare the build of the hello-world sample, located in the sample folder of Zephyr kernel file tree.
-
Name:
zephyr-hello-world -
Package Name:
zephyr-hello-world -
Distributions: Select one Zephyr distribution only
Note: Multi distribution builds should be available later
- Default package branch: main
-
Source URL:
leave empty -
Source revision:
leave empty - Specfile: Internal Spec File
Under “application services” tab, please disable “Version update” option.
You can then replace the content of generated specfile by this specfile template and edit some fields if needed.
Zephyr custom user app
As a Zephyr custom user app example, let’s look at how we create our zephyr-shell app for Zephyr latest distribution.
This example can also be built for Zephyr LTS releases distribution by using dedicated “lts3” tags.
-
Name:
zephyr-shell -
Package Name:
zephyr-shell -
Distributions: Select one Zephyr distribution only
Note: Multi distribution builds should be available later
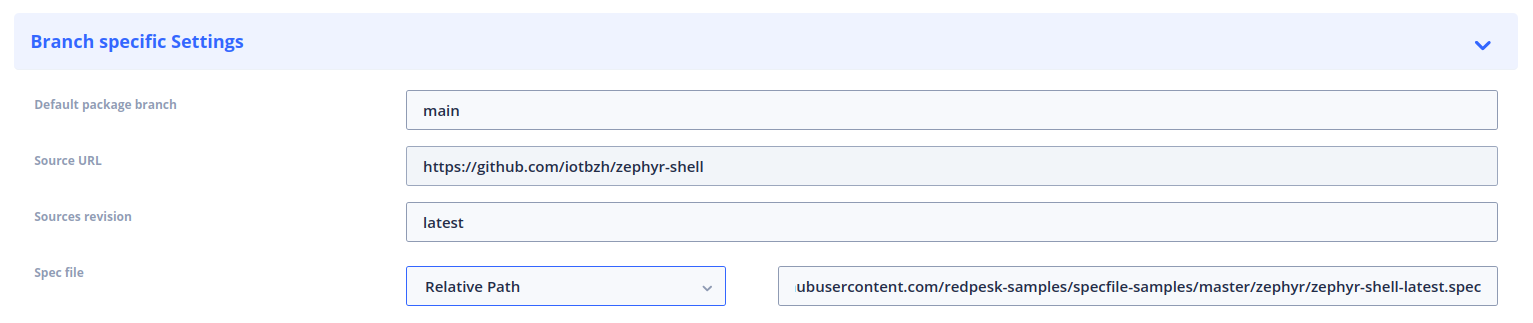
- Default package branch: main
- Source URL: https://github.com/iotbzh/zephyr-shell
- Source revision: latest
- Specfile: Internal Spec File
Under “application services” tab, please disable “Version update” option.
You can then replace the content of generated specfile by this specfile template and edit some fields if needed.
Zephyrs apps templates
To help you get started, we provide some specfile templates for both Zephyr sample app and Zephyr custom user app.
Zephyr apps specfile templates are available here, you can complete them based on our specfile samples available here and/or with this guide.
Here’s how to fill in _TO_COMPLETE_ fields:
-
target name: Your board Zephyr name (used by
westto build your firmware for your target) - target toolchain: Please fill target architecture using list of available toolchains here.
- Name: Should be your redpesk App name
- Version: branch or tag name used at app creation (if in x.x.x form, 0.0.0 otherwise)
- Summary: Short summary for your Zephyr app, can be left empty
- License: Your Zephyr app sources license, can be left empty
- URL: URL to your app sources, can be left empty
- Description: Longer description of your Zephyr app, can be left empty
Zephyr sample app specific configuration:
For Zephyr in-tree app, we also need to specify the path to the sources of the app under the Zephyr kernel file tree.
Please refer to the kernel file tree and edit the _TO_COMPLETE_ field under %prep.
- Latest Kernel file tree: https://github.com/zephyrproject-rtos/zephyr/tree/v4.2.0
- LTS3 Kernel file tree: https://github.com/zephyrproject-rtos/zephyr/tree/v3.7.1
Some advanced configuration:
- If your Zephyr app has a custom build name, you need to edit lines under the
%installsection by providing reliable firmware paths. - Default output directory for firmware is
/lib/firmware, it can be edited in the specfile in%filessection.
Build your app
1 - At each specfile edition, an SRPM build will automatically be triggered.
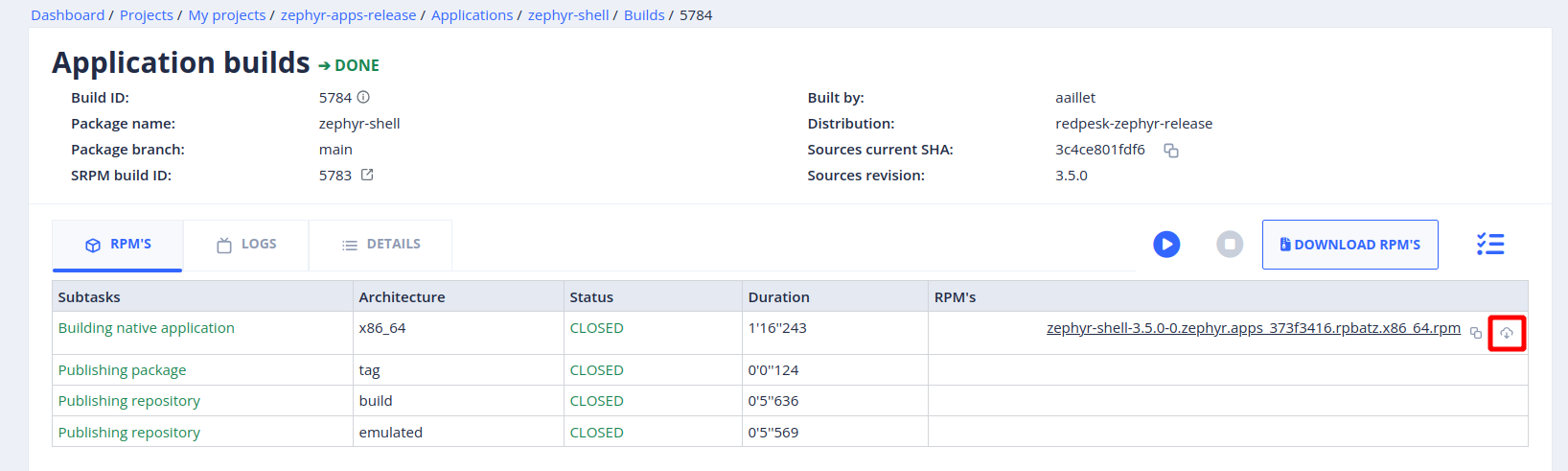
2 - Once an SRPM is ready for your current specfile version, you can trigger a build as you usually do in the redpesk Factory.
3 - Once the build is done, you can find your output RPM containing your firmware files in the RPM's build tab. You can download RPM using GUI.
4 - This RPM can also be shipped in an Image, in this case, firmware files will be available in /lib/firmware folder by default.
Build and run on QEMU64
Some specific QEMU64 directives are already applied in our specfile samples and templates with qemu_x86_64 as targetname:
cd build && ninja qemu_locore_image_target qemu_main_image_target%{__install} -m 755 build/zephyr/zephyr*qemu*.elf %{buildroot}/lib/firmware/
Build and run guide for QEMU64:
- Build your app and download output RPM as described here.
- Install
qemu-system-x86_64&rpm2cpioon your system - Execute the following commands
# Create and enter working dir
mkdir -p qemu64-zephyr
cd qemu64-zephyr
# Download the RPM here using GUI
# Extract the RPM content here
rpm2cpio zephyr-xxxx.rpm | cpio -idmv
# Run firmware on QEMU64
qemu-system-x86_64 -m 32 -cpu qemu64,+x2apic,mmx,mmxext,sse,sse2 -machine q35 -device isa-debug-exit,iobase=0xf4,iosize=0x04 -no-reboot -nographic -machine acpi=off -net none -pidfile qemu.pid -chardev stdio,id=con,mux=on -serial chardev:con -mon chardev=con,mode=readline -device loader,file=./lib/firmware/zephyr-qemu-main.elf -smp cpus=2 -kernel ./lib/firmware/zephyr-qemu-locore.elf
- Here is the obtained log when booting
hello-worldsample on a QEMU64 system:SeaBIOS (version 1.16.3-2.fc40) Booting from ROM.. *** Booting Zephyr OS build *** Hello World! qemu_x86_64
Note: QEMU64 commands have been tested on the following qemu-system-x86_64 version:
- 9.2.4 on Fedora 42 : OK
- 8.2.2 on Fedora 40 : OK
- 6.2.0 on ubuntu 22.04 : OK
- 4.2.1 on ubuntu 20.04 : OK - (remove
-machine acpi=offfrom the above command)